end of arm tooling definition
This page is about the various. What Is End Of Arm Tooling Eoat In A Robot Eoat Meaning Sophisticated Grippers And End Of Arm Tooling Eoat For Robots Melss End Of Arm Tooling Eoat By Robotic.
Ultimate Guide To End Of Arm Tooling Eoat Dek
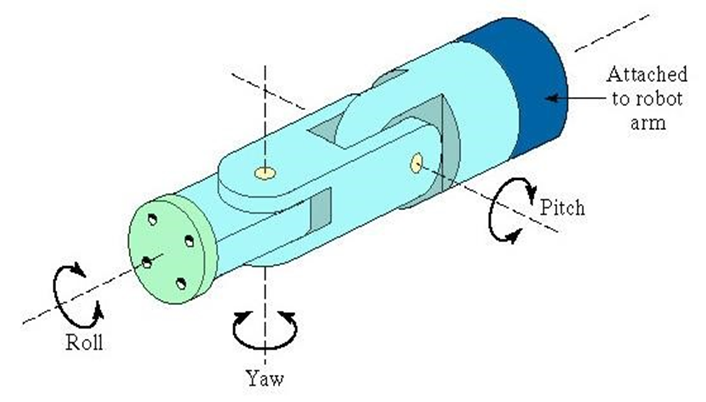
The end of arm tooling is a special type of light-weighted conformal and strong hand extension in the robots.
. If you have ever tapped into the subject of collaborative robotics then you have most certainly encountered the terms end of arm tooling or EoAT. You can read the full post hereh. If youre interested in automating your food processing facility and integrating robotics one of the biggest considerations youll encounter is end-of-arm tooling.
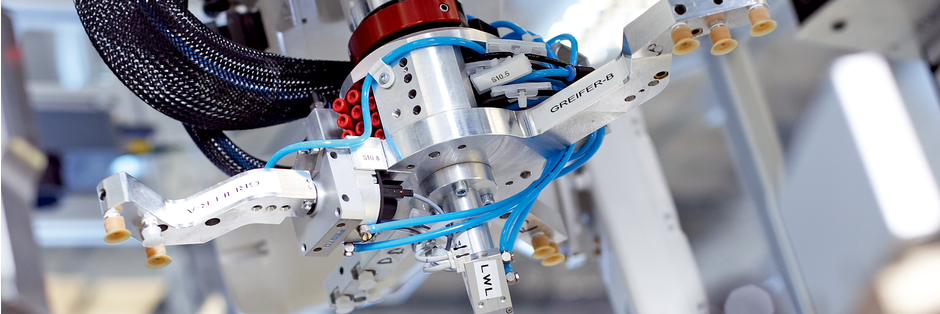
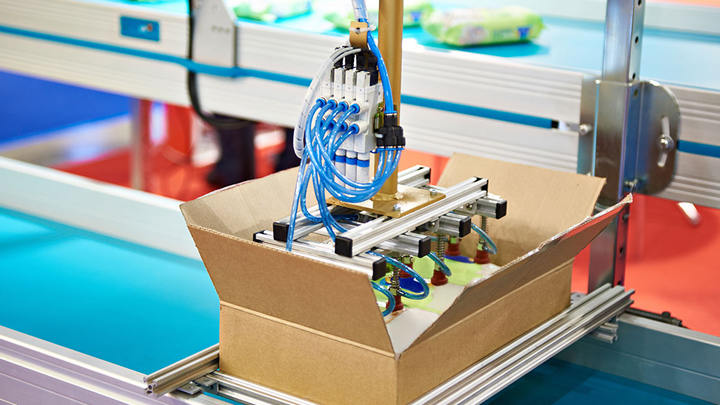
Looking for the shorthand of end of arm tooling. End of Arm Tooling EOAT refers to any device that is attached to the end of the robots arm that allows the robot to interact with parts in the environment and assists in. They range from simple two-fingered grippers for pick-and-place tasks to complex.
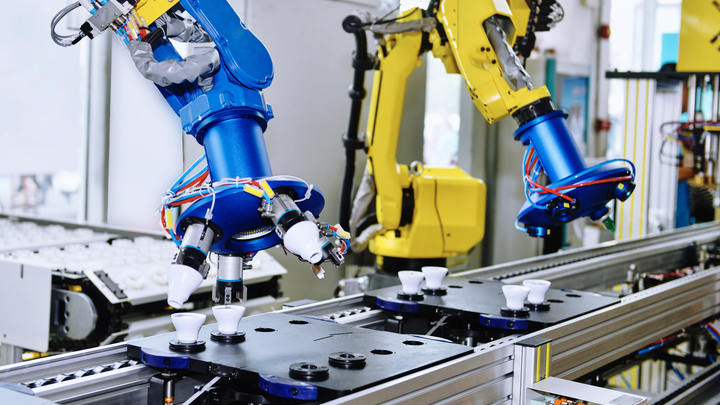
EoAT also known as end. The end of arm tooling provides automation to the robot. The end-effector is the end of arm tooling that grips the workpiece usually by means of grippers suction or magnetics.
End-of-arm tooling The most essential robot peripheral is the end effector or end-of-arm-tooling EOT. An end-of-arm tool has many other names such as end effector claw gripper robot tool and others. Weve got 2 shorthands for end of arm tooling What is the abbreviation for end of arm tooling.
Stirling Paatz of robot integrators Barr. Robotic Automation Systems End of Arm Tooling EOAT provides. Having a hole or empty space inside.
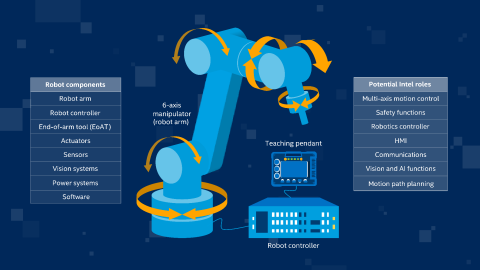
Operated by a Controller and typically Servo or pneumatically driven Robotic arms are comprised of a number of various joints and shorter Arms designed to manipulate. Simply put end-of-arm tooling. End of Arm Tooling EOAT refers to any device that is attached to the end of the robots arm that allows the robot to interact with parts in the environment and assists in the.
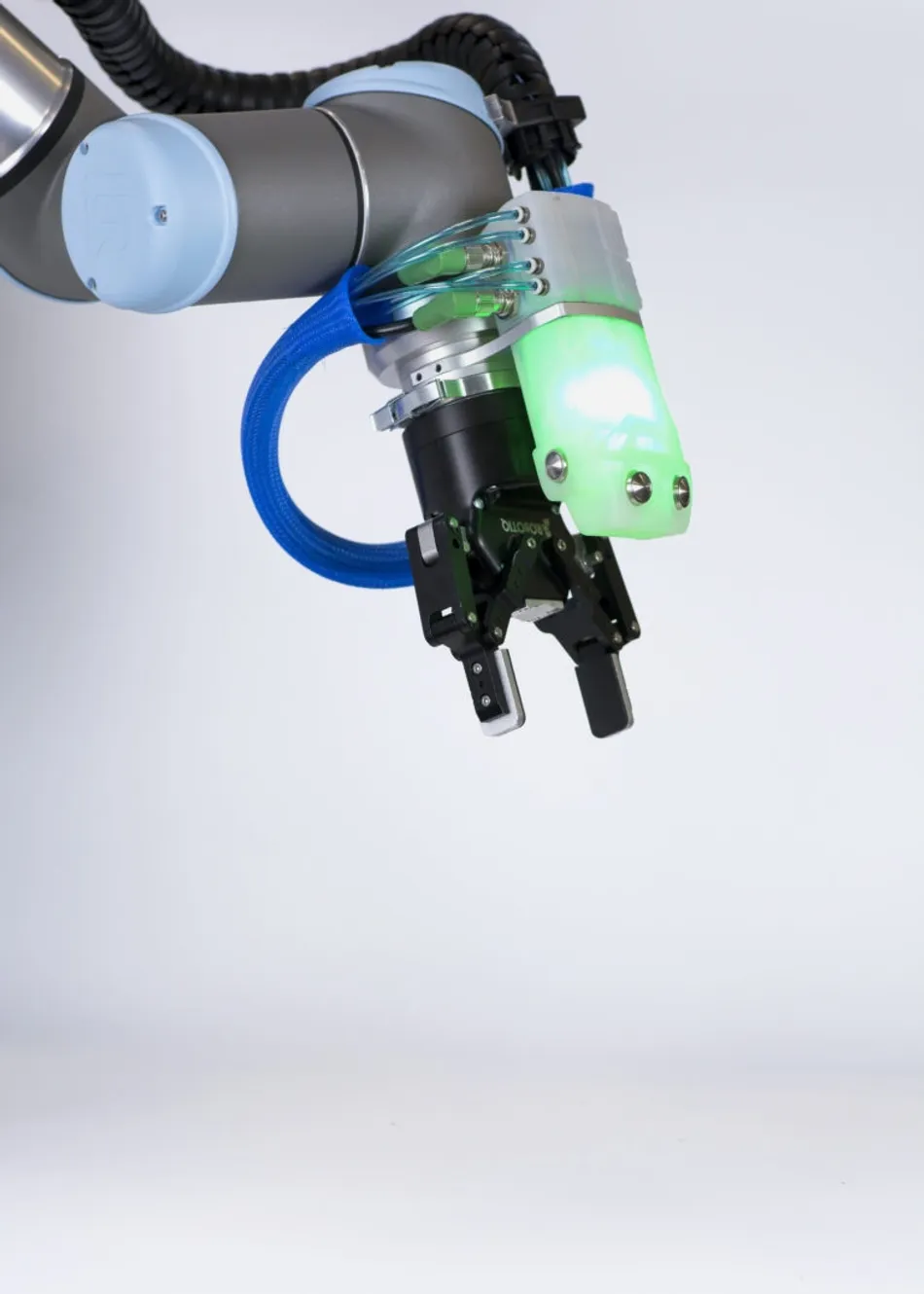
End of Arm Tooling EOAT could be gripers for clamping the objects or tools for manufacturing operations. A robot gripper is an end-effector or sometimes called end-of-arm tooling that is used on industrial robots for material handling eg grasping holding lifting moving and controlling. View the translation definition meaning transcription and examples for End of arm tooling learn synonyms antonyms and listen to the pronunciation for End of arm tooling Menu.
What To Know About End Of Arm Tooling Robot Arm Robot Parts Robot Monster Minibot With Arm By Chris Rogers At Coroflot Com Monster Robot Design Diy Robot Grz 32. Arc welding spot welding painting polishing grinding machining etc. Most end effectors are mechanical or electromechanical and serve as grippers process tools or sensors.
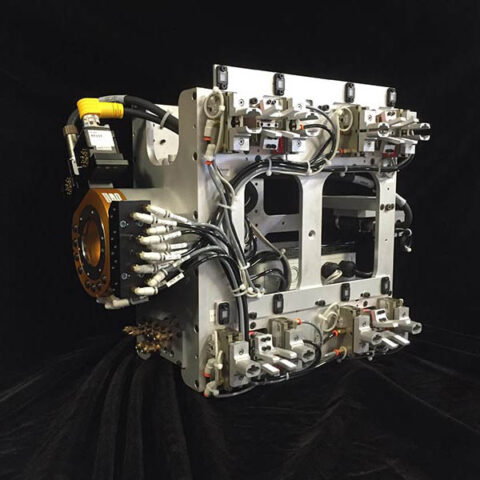
Simply put the object which connects the robot physically to the work being. A dozen robot dos and donts. End of arm tooling EOAT is a crucial aspect of robotic technology.
It refers to the equipment that interacts with parts and components typically at the end of a robotic arm.
Industrial Robotic Arm Overview Intel

What Is End Of Arm Tooling Eoat In A Robot Eoat Meaning
Robotics Sick

End Of Arm Tooling Eoat Applications In 3d Printing

What Is End Of Arm Tooling Eoat In A Robot Eoat Meaning

Robotic End Of Arm Tooling By Piab Eoat And Gripper Systems

What Is End Of Arm Tooling Eoat In A Robot Eoat Meaning
Ultimate Guide To End Of Arm Tooling Eoat Dek

What Is End Of Arm Tooling Eoat In A Robot Eoat Meaning
Automation 101 End Of Arm Tooling
![]()
Robotic End Of Arm Tooling By Piab Eoat And Gripper Systems

Ultimate Guide To End Of Arm Tooling Eoat Dek
Demystifying Robotics A Drone S Eye View Arthur D Little

What Is End Of Arm Tooling Eoat In A Robot Eoat Meaning

Robot End Effector Definition And Examples
4 Robot End Of Arm Tooling Inlearc

What Is End Of Arm Tooling Eoat In A Robot Eoat Meaning
Ultimate Guide To End Of Arm Tooling Eoat Dek
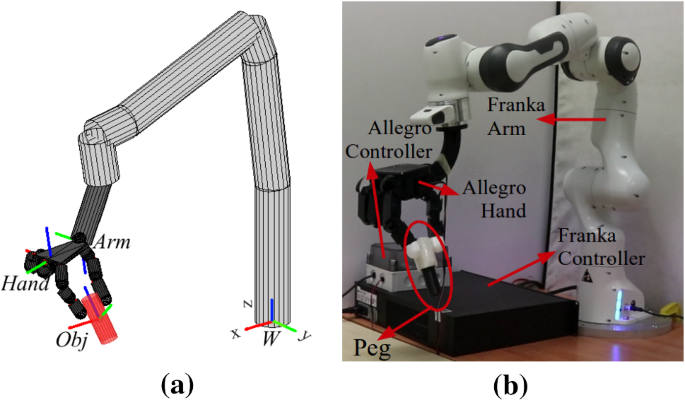
An Approach To Object Level Stiffness Regulation Of Hand Arm Systems Subject To Under Actuation Constraints Springerlink